










Varför navigering är en utmaning för robotdammsugare i kommersiell användning
I professionella byggnader råder förhållanden som utgör en utmaning för navigationssystem. Ytorna är stora, planlösningarna varierar och förändras ofta: dörrar står öppna, vagnar flyttas, människor rör sig genom utrymmena eller så kör flera robotar samtidigt. En pålitlig navigering för dammsugarrobotar måste hantera detta säkert, utan avbrott och utan att förlora orienteringen.
En annan punkt är dataskyddet. Många konsumentprodukter använder kameror. Vid kommersiell användning kan detta vara problematiskt, eftersom personer eller känsligt innehåll kan registreras. En professionell lösning bygger därför på laserbaserad SLAM-navigering utan kamerabilder.
Vad SLAM betyder – teknisk klassificering
SLAM står för ”Simultaneous Localization and Mapping”. Begreppet SLAM Robotics beskriver algoritmer som gör att en robot samtidigt kan kartlägga och lokalisera sig. Två uppgifter löper då oavbrutet parallellt:
- Lokalisering: Var befinner sig roboten just nu?
- Kartläggning: Hur ser omgivningen ut strukturellt?
SLAM är inte en enskild sensor, utan en matematisk metod där karta och position skapas parallellt. Professionella system använder lasersensorer istället för kameror, eftersom det fungerar oberoende av ljus, är mindre störningskänsligt och uppfyller dataskyddslagstiftningen.
Hur SLAM-navigering fungerar i en dammsugarrobot
En dammsugarrobot med SLAM-navigering bearbetar sensordata kontinuerligt. Den tekniska processen är tydligt strukturerad:
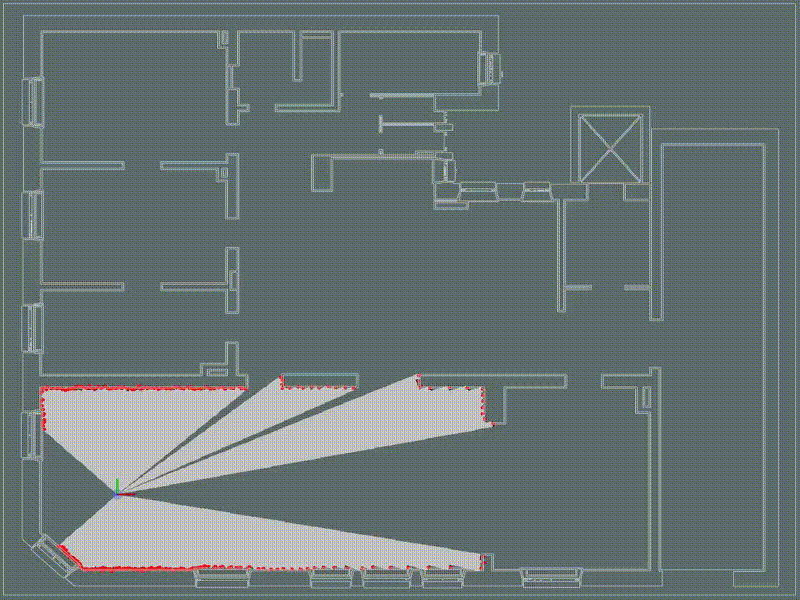
- Laserskannern registrerar omgivningen och genererar flera tusen mätpunkter per sekund.
- Dessa punkter sammanställs till former, kanter och öppningar.
- Nya data jämförs med den befintliga kartan.
- Positionen beräknas i realtid med hjälp av probabilistiska modeller.
- Hinder eller förändringar beaktas omedelbart, och rutten anpassas automatiskt.
Tekniska fördelar med laserskannrar jämfört med kameranavigering
Laser-SLAM löser typiska problem som uppstår i kommersiell drift:
- Fungerar oberoende av ljus och skugga
- Mycket precis positionering över stora avstånd
- Inga dataskyddsrisker genom bildtagning
- Hög reproducerbarhet av rutten
- Precision i trånga utrymmen och långa korridorer
- Mindre känslighet för driftstopp tack vare enkel, robust sensorteknik
Jämförelse mellan Laser-SLAM och kameranavigering
Hur Nexaro NR 1700 implementerar SLAM
Nexaro NR 1700 arbetar med laserbaserad SLAM-navigering, helt utan kamera. Detta uppfyller konsekvent kraven inom städbranschen: hög precision, tydliga kartor och tillförlitlig positionsbestämning.
Fördelar i praktiken:
- Precis lokalisering även i komplexa utrymmen
- Dokumenterbar städprestanda
- Stabil drift i flera skift
- Inget Wi-Fi krävs
- Europeiska servrar och TÜV-certifierad säkerhet
Med Nexaro HUB kan man hantera kartor, styra flottor och definiera driftstider. För fastighetsserviceföretag skapas därmed ett system som fungerar planerat och effektivt.
Typiska utmaningar – och hur SLAM löser dem
SLAM måste reagera flexibelt i verkliga miljöer:
- Rörliga hinder → uppdateringar i realtid
- Symmetriska rum → landmärken, objektigenkänning
- Flyttade möbler → lokala kartjusteringar
- Stora öppna ytor → rörelsemodeller, filter
- Smuts på sensorer → adaptiv felkorrigering
Det är just här som skillnaden mellan enkel orientering och äkta SLAM Robotics visar sig. SLAM är en teknisk grund som i professionellt bruk avgör tillförlitlighet, kvalitet och planerbarhet. Laserbaserade metoder övertygar genom precision, stabilitet och dataskydd. Nexaro NR 1700 tillämpar denna teknik konsekvent och erbjuder en navigering som har utvecklats för kommersiellt bruk.
