










Waarom navigatie bij professionele robotstofzuigers een uitdaging is
In professionele gebouwen heersen omstandigheden die een uitdaging vormen voor navigatiesystemen. De oppervlakten zijn groot, de plattegronden verschillen en ze veranderen vaak: deuren staan open, karren worden verplaatst, mensen lopen door de ruimtes of er rijden meerdere robots tegelijk rond. Een betrouwbare navigatie voor robotstofzuigers moet hier veilig mee omgaan, zonder haperingen en zonder het oriëntatievermogen te verliezen.
Een ander punt is de gegevensbescherming. Veel consumentenapparaten maken gebruik van camera's. Bij professioneel gebruik kan dit problematisch zijn, omdat personen of gevoelige inhoud kunnen worden vastgelegd. Een professionele oplossing maakt daarom gebruik van op laser gebaseerde SLAM-navigatie zonder camerabeelden.
Wat SLAM betekent – technische classificatie
SLAM staat voor „Simultaneous Localization and Mapping“. De term SLAM Robotics beschrijft algoritmen waarmee een robot tegelijkertijd in kaart brengt en lokaliseert. Twee taken lopen daarbij ononderbroken samen:
- Lokalisatie: Waar bevindt de robot zich op dit moment?
- In kaart brengen: Hoe ziet de omgeving er structureel uit?
SLAM is geen afzonderlijke sensor, maar een wiskundige benadering waarbij kaart en positie parallel ontstaan. Professionele systemen maken gebruik van lasersensoren in plaats van camera's, omdat dit onafhankelijk van licht werkt, minder storingsgevoelig is en in overeenstemming blijft met de privacywetgeving.
Hoe SLAM-navigatie in een robotstofzuiger werkt
Een robotstofzuiger met SLAM-navigatie verwerkt continu sensorgegevens. Het technische proces is duidelijk gestructureerd:
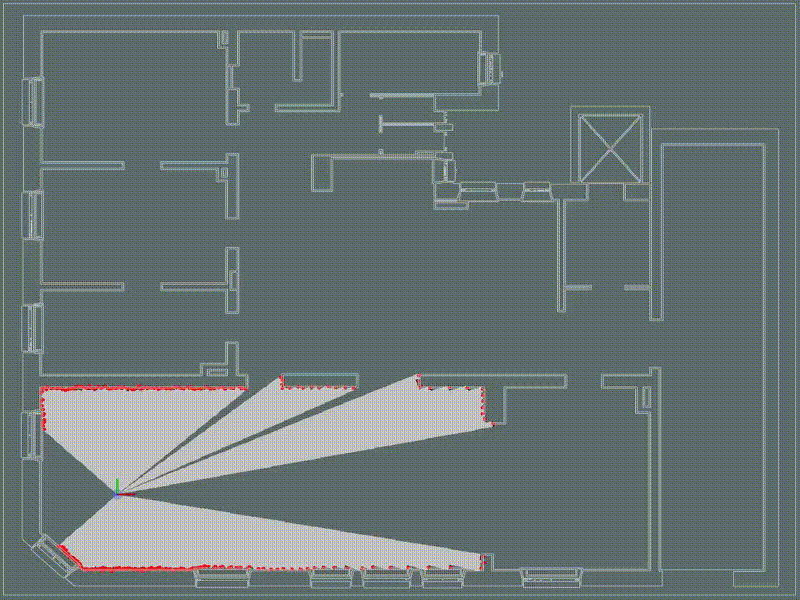
- De laserscanner registreert de omgeving en genereert enkele duizenden meetpunten per seconde.
- Deze punten worden samengevat tot vormen, randen en openingen.
- Nieuwe gegevens worden vergeleken met de reeds bestaande kaart.
- De positie wordt in realtime berekend via probabilistische modellen.
- Er wordt onmiddellijk rekening gehouden met obstakels of veranderingen; de route past zich automatisch aan.
Technische voordelen van laserscanners ten opzichte van cameranavigatie
Laser-SLAM lost typische problemen op die zich in commerciële omgevingen voordoen:
- Werkt onafhankelijk van licht en schaduw
- Zeer nauwkeurige positionering over grote afstanden
- Geen privacyrisico's door het maken van foto's
- Hoge reproduceerbaarheid van de route
- Nauwkeurigheid in krappe ruimtes en lange gangen
- Minder storingsgevoelig door eenvoudige, robuuste sensortechnologie
Vergelijking Laser-SLAM vs. cameranavigatie
Hoe de Nexaro NR 1700 SLAM implementeert
De Nexaro NR 1700 werkt met op laser gebaseerde SLAM-navigatie, volledig zonder camera. Dit voldoet consequent aan de eisen van de schoonmaakbranche: hoge precisie, duidelijke kaarten en betrouwbare positiebepaling.
Voordelen in de praktijk:
- Nauwkeurige lokalisatie, zelfs in complexe ruimtes
- Documenteerbare reinigingsprestaties
- Stabiel gebruik in meerdere ploegen
- Geen wifi nodig
- Europese servers en TÜV-gecertificeerde veiligheid
Met de Nexaro HUB kunnen kaarten worden beheerd, vloten worden aangestuurd en inzeturen worden gedefinieerd. Voor schoonmaakbedrijven ontstaat zo een systeem dat planbaar en efficiënt werkt.
Typische uitdagingen – en hoe SLAM deze oplost
SLAM moet in reële omgevingen flexibel reageren:
- Bewegende obstakels → realtime updates
- Symmetrische ruimtes → oriëntatiepunten, herkenning van kenmerken
- Verplaatst meubilair → lokale kaartaanpassingen
- Grote open ruimtes → bewegingsmodellen, filters
- Vuil op sensoren → adaptieve foutcorrectie
Juist hier komt het verschil tussen eenvoudige oriëntatie en echte SLAM Robotics naar voren. SLAM is een technische basis die bij professioneel gebruik bepalend is voor betrouwbaarheid, kwaliteit en planbaarheid. Lasergestuurde methoden overtuigen door precisie, stabiliteit en gegevensbescherming. De Nexaro NR 1700 past deze technologie consequent toe en biedt een navigatiesysteem dat is ontwikkeld voor commercieel gebruik.
