










Hvorfor navigation er en udfordring for robotstøvsugere til erhvervsbrug
I erhvervsbygninger hersker der forhold, der udgør en udfordring for navigationssystemer. Arealerne er store, grundplanerne varierer, og de ændrer sig ofte: Døre står åbne, vogne flyttes, mennesker bevæger sig rundt i områderne, eller flere robotter kører samtidig. En pålidelig navigation til robotstøvsugere skal kunne håndtere dette sikkert, uden udfald og uden at miste orienteringen.
Et andet punkt er databeskyttelse. Mange forbrugerenheder bruger kameraer. I erhvervsmæssig brug kan dette være problematisk, da personer eller følsomme indhold kan blive registreret. En professionel løsning satser derfor på laserbaseret SLAM-navigation uden kamerabilleder.
Hvad SLAM betyder – teknisk klassificering
SLAM står for „Simultaneous Localization and Mapping“. Begrebet SLAM Robotics beskriver algoritmer, der lader en robot kortlægge og lokalisere sig selv samtidigt. To opgaver kører herved uafbrudt sammen:
- Lokalisering: Hvor befinder robotten sig i dette øjeblik?
- Kortlægning: Hvordan ser omgivelserne strukturelt ud?
SLAM er ikke en enkelt sensor, men en matematisk tilgang, hvor kort og position opstår parallelt. Professionelle systemer bruger lasersensorer i stedet for kameraer, fordi det fungerer uafhængigt af lys, er mindre følsomt over for forstyrrelser og overholder databeskyttelseslovgivningen.
Sådan fungerer SLAM-navigation i en støvsugerrobot
En støvsugerrobot med SLAM-navigation behandler konstant sensordata. Den tekniske proces er klart struktureret:
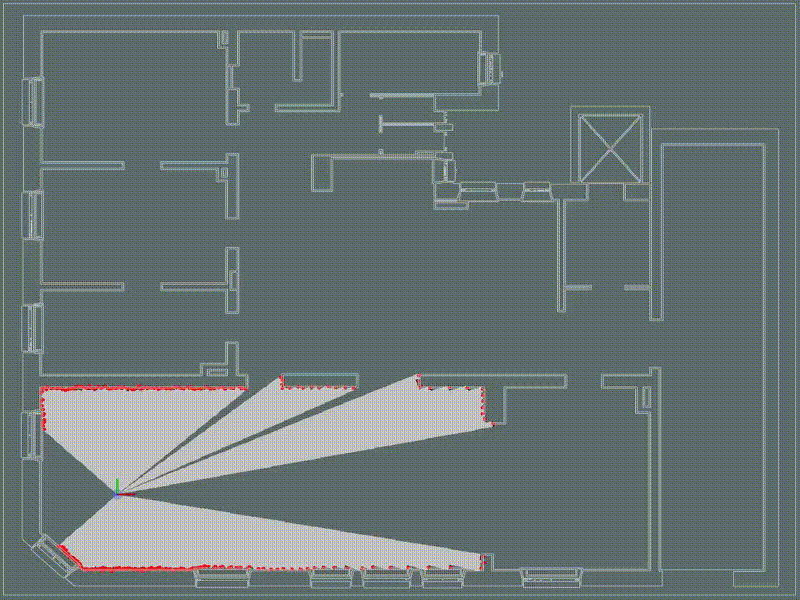
- Laserscanneren registrerer omgivelserne og genererer flere tusinde målepunkter pr. sekund.
- Disse punkter samles til former, kanter og åbninger.
- Nye data sammenlignes med det allerede eksisterende kort.
- Positionen beregnes i realtid ved hjælp af probabilistiske modeller.
- Forhindringer eller ændringer tages straks i betragtning, og ruten tilpasses automatisk.
Tekniske fordele ved laserscannere i forhold til kameranavigation
Laser-SLAM løser typiske problemer, der opstår i erhvervsmæssig drift:
- Arbejder uafhængigt af lys og skygge
- Meget præcis positionering over store afstande
- Ingen risici for brud på databeskyttelsen ved billedoptagelser
- Høj reproducerbarhed af ruten
- Præcision i trange områder og lange gange
- Mindre udsat for nedbrud takket være enkel, robust sensorik
Sammenligning af Laser-SLAM og kameranavigation
Sådan implementerer Nexaro NR 1700 SLAM
Nexaro NR 1700 arbejder med laserbaseret SLAM-navigation, helt uden kamera. Dette opfylder konsekvent rengøringsbranchens krav: høj præcision, klare kort og pålidelig positionsbestemmelse.
Fordele i praksis:
- Præcis lokalisering, selv i komplekse områder
- Dokumenterbar rengøringsydelse
- Stabil drift i flere skift
- Intet WLAN påkrævet
- Europæiske servere og TÜV-certificeret sikkerhed
Med Nexaro HUB kan man administrere kort, styre flåder og definere driftstider. For bygningsserviceudbydere skaber dette et system, der fungerer planlæggeligt og effektivt.
Typiske udfordringer – og hvordan SLAM løser dem
SLAM skal reagere fleksibelt i virkelige omgivelser:
- Bevægelige forhindringer → realtidsopdateringer
- Symmetriske rum → landemærker, genkendelse af karakteristika
- Flyttet møbler → lokale kortjusteringer
- Store åbne områder → bevægelsesmodeller, filtre
- Snavs på sensorer → adaptiv fejlkorrektion
Det er netop her, forskellen mellem simpel orientering og ægte SLAM Robotics viser sig. SLAM er et teknisk grundlag, der i professionel brug er afgørende for pålidelighed, kvalitet og planlægning. Laserbaserede metoder overbeviser med præcision, stabilitet og databeskyttelse. Nexaro NR 1700 implementerer denne teknologi konsekvent og tilbyder en navigation, der er udviklet til kommerciel brug.
