










Perché la navigazione è impegnativa nei robot aspirapolvere commerciali
Nei edifici professionali si presentano condizioni che rappresentano una sfida per i sistemi di navigazione. Le superfici sono ampie, le planimetrie variano e cambiano spesso: porte aperte, carrelli spostati, persone che si muovono nelle aree o più robot che operano contemporaneamente. Una navigazione affidabile per robot aspirapolvere deve gestire tutto ciò senza interruzioni e senza perdere l’orientamento.
Un altro aspetto è la protezione dei dati. Molti dispositivi consumer utilizzano telecamere. Nell’uso commerciale questo può essere problematico, poiché possono essere catturate persone o contenuti sensibili. Una soluzione professionale si basa quindi su una navigazione SLAM laser senza immagini da telecamera.
Cosa significa SLAM – classificazione tecnica
SLAM sta per “Simultaneous Localization and Mapping” (localizzazione e mappatura simultanee). Il termine SLAM Robotics descrive algoritmi che permettono a un robot di mappare e localizzarsi contemporaneamente. Due compiti si svolgono ininterrottamente insieme:
- Localizzazione: Dove si trova il robot in questo momento?
- Mappatura: Com’è strutturato l’ambiente circostante?
SLAM non è un singolo sensore, ma un approccio matematico in cui mappa e posizione si sviluppano parallelamente. I sistemi professionali utilizzano sensori laser invece delle telecamere, perché funzionano indipendentemente dalla luce, sono meno soggetti a interferenze e rispettano la privacy.
Come funziona la navigazione SLAM nel robot aspirapolvere
Un robot aspirapolvere con navigazione SLAM elabora continuamente i dati dei sensori. Il processo tecnico è chiaramente strutturato:
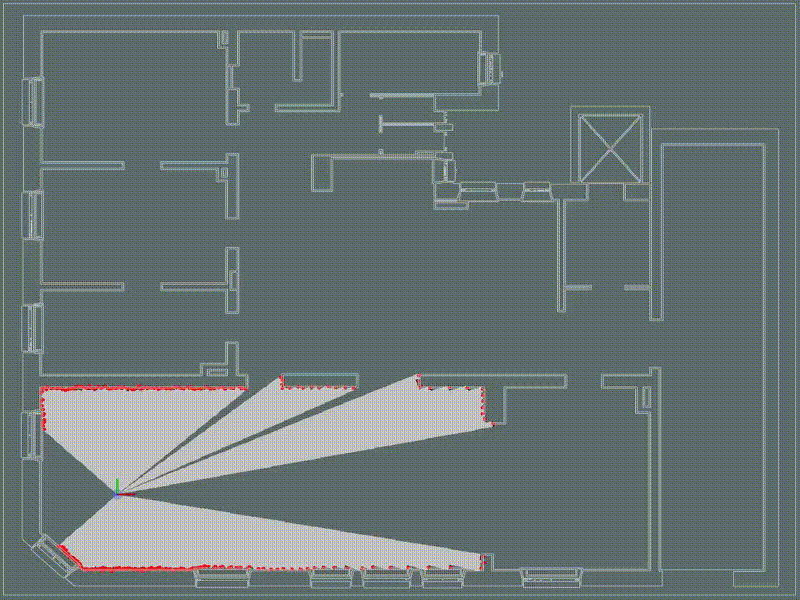
- Il laser scanner rileva l’ambiente e genera diverse migliaia di punti di misura al secondo.
- Questi punti vengono raggruppati in forme, bordi e aperture.
- I nuovi dati vengono confrontati con la mappa già esistente.
- La posizione viene calcolata in tempo reale tramite modelli probabilistici.
- Ostacoli o cambiamenti vengono immediatamente considerati e il percorso si adatta automaticamente.
Vantaggi tecnici dei laser scanner rispetto alla navigazione con telecamera
Il laser-SLAM risolve problemi tipici che si presentano nell’uso commerciale:
- Funziona indipendentemente da luce e ombre
- Posizionamento molto preciso su grandi distanze
- Nessun rischio per la privacy dovuto a immagini
- Alta riproducibilità del percorso
- Precisione in spazi stretti e corridoi lunghi
- Minore rischio di guasti grazie a sensori semplici e robusti
Come il Nexaro NR 1700 implementa SLAM
Il Nexaro NR 1700 utilizza una navigazione SLAM basata su laser, completamente senza telecamera. Questo soddisfa in modo coerente le esigenze del settore delle pulizie: alta precisione, mappe chiare e localizzazione affidabile.
Vantaggi nella pratica:
- Localizzazione precisa anche in ambienti complessi
- Prestazioni di pulizia documentabili
- Funzionamento stabile a più livelli
- Non richiede WLAN
- Server europei e sicurezza certificata TÜV
Con il Nexaro HUB è possibile gestire le mappe, controllare le flotte e definire i tempi di utilizzo. Per i fornitori di servizi di pulizia nasce così un sistema pianificabile ed efficiente.
Sfide tipiche – e come SLAM le risolve
SLAM deve reagire in modo flessibile negli ambienti reali:
- Ostacoli in movimento → aggiornamenti in tempo reale
- Spazi simmetrici → punti di riferimento, riconoscimento delle caratteristiche
- Mobili spostati → adattamenti locali della mappa
- Aree aperte ampie → modelli di movimento, filtro
- Sporco sui sensori → correzione adattiva degli errori
Proprio qui si vede la differenza tra una semplice orientazione e una vera SLAM Robotics. SLAM è una base tecnica che nel settore professionale determina affidabilità, qualità e pianificabilità. I metodi basati su laser convincono per precisione, stabilità e protezione dei dati. Il Nexaro NR 1700 applica questa tecnologia in modo coerente e offre una navigazione sviluppata per l’uso commerciale.
