










Miksi navigointi on haastavaa ammattikäyttöön tarkoitetuissa imurointiroboteissa
Ammattikäyttöön tarkoitetuissa rakennuksissa vallitsevat olosuhteet, jotka asettavat haasteita navigointijärjestelmille. Tilat ovat suuria, pohjapiirrokset vaihtelevia ja muuttuvat usein: ovet ovat auki, vaunuja siirretään, ihmiset liikkuvat tiloissa tai useita robotteja liikkuu samanaikaisesti. Luotettavan imurointirobottien navigoinnin on pystyttävä käsittelemään tämä tilanne turvallisesti, ilman katkoja ja ilman suunnan menettämistä.
Toinen seikka on tietosuoja. Monet kuluttajalaitteet käyttävät kameroita. Kaupallisessa käytössä tämä voi olla ongelmallista, koska laitteet voivat tallentaa henkilöitä tai arkaluontoista sisältöä. Ammattimainen ratkaisu perustuu siksi laserpohjaiseen SLAM-navigointiin ilman kamerakuvia.
Mitä SLAM tarkoittaa – tekninen luokittelu
SLAM on lyhenne sanoista „Simultaneous Localization and Mapping“. Termi SLAM Robotics kuvaa algoritmeja, joiden avulla robotti voi kartoittaa ja paikantaa itsensä samanaikaisesti. Kaksi tehtävää kulkee tässä jatkuvasti rinnakkain:
- Paikannus: Missä robotti sijaitsee tällä hetkellä?
- Kartoitus: Miltä ympäristö näyttää rakenteellisesti?
SLAM ei ole yksittäinen anturi, vaan matemaattinen lähestymistapa, jossa kartta ja sijainti syntyvät rinnakkain. Ammattimaiset järjestelmät käyttävät lasersensoreita kameroiden sijaan, koska ne toimivat valosta riippumatta, ovat vähemmän häiriöherkkiä ja noudattavat tietosuojalakeja.
Kuinka SLAM-navigointi toimii imurointirobotissa
Imurointirobotti, jossa on SLAM-navigointi, käsittelee jatkuvasti anturidataa. Tekninen prosessi on selkeästi jäsennelty:
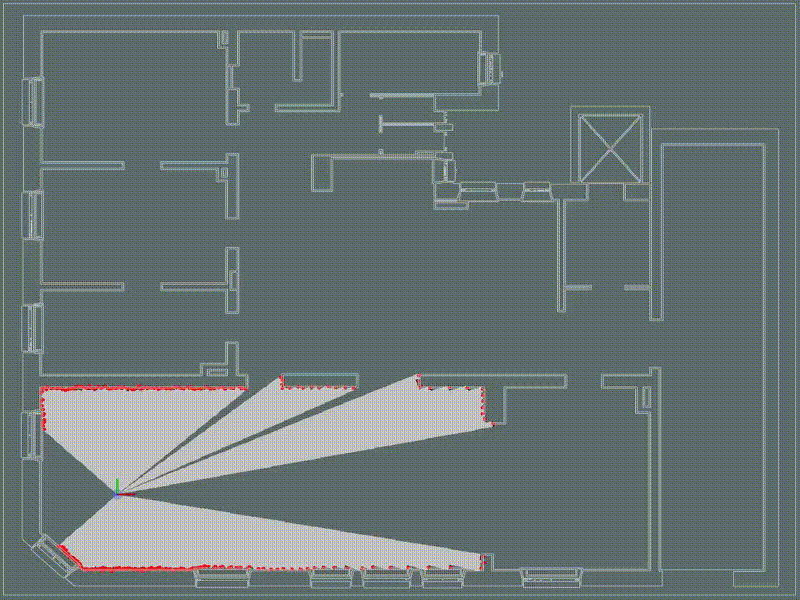
- Laserskanneri kartoittaa ympäristön ja tuottaa useita tuhansia mittauspisteitä sekunnissa.
- Nämä pisteet yhdistetään muotoiksi, reunoiksi ja aukkoiksi.
- Uudet tiedot verrataan jo olemassa olevaan karttaan.
- Sijainti lasketaan reaaliajassa todennäköisyysmallien avulla.
- Esteet tai muutokset otetaan välittömästi huomioon, ja reitti mukautuu automaattisesti.
Laserskannerien tekniset edut kameranavigointiin verrattuna
Laser-SLAM ratkaisee tyypillisiä ongelmia, joita esiintyy kaupallisessa käytössä:
- Toimii valosta ja varjoista riippumatta
- Erittäin tarkka paikannus suurilla etäisyyksillä
- Ei tietosuojariskejä kuvien ottamisen vuoksi
- Reitin korkea toistettavuus
- Tarkkuus ahtaissa tiloissa ja pitkillä käytävillä
- Pienempi vikaantumisalttius yksinkertaisen, vankan anturitekniikan ansiosta
Laser-SLAM vs. kameranavigointi
Kuinka Nexaro NR 1700 toteuttaa SLAM-tekniikan
Nexaro NR 1700 toimii laserpohjaisella SLAM-navigoinnilla, täysin ilman kameraa. Tämä täyttää siivousalan vaatimukset johdonmukaisesti: korkea tarkkuus, selkeät kartat ja luotettava paikannus.
Käytännön edut:
- Tarkka paikannus myös monimutkaisissa tiloissa
- Dokumentoitava siivoustulos
- Vakaa monivuorokäyttö
- Ei vaadi Wi-Fi-yhteyttä
- Eurooppalaiset palvelimet ja TÜV-sertifioitu turvallisuus
Nexaro HUB:n avulla voidaan hallita karttoja, ohjata laivastoa ja määritellä käyttöajat. Rakennusten huoltopalvelujen tarjoajille syntyy näin järjestelmä, joka toimii suunnitellusti ja tehokkaasti.
Tyypillisiä haasteita – ja miten SLAM ratkaisee ne
SLAM:n on reagoitava joustavasti todellisissa ympäristöissä:
- Liikkuvat esteet → reaaliaikaiset päivitykset
- Symmetriset tilat → maamerkit, piirteiden tunnistus
- Siirretyt huonekalut → paikalliset karttamuutokset
- Suuret avoimet tilat → liike-mallit, suodattimet
- Lika antureissa → adaptiivinen virheenkorjaus
Juuri tässä näkyy ero yksinkertaisen suunnistuksen ja aidon SLAM Roboticsin välillä. SLAM on tekninen perusta, joka ammattikäytössä ratkaisee luotettavuuden, laadun ja suunniteltavuuden. Laserpohjaiset menetelmät vakuuttavat tarkkuudellaan, vakaudellaan ja tietosuojallaan. Nexaro NR 1700 hyödyntää tätä teknologiaa johdonmukaisesti ja tarjoaa navigointia, joka on kehitetty kaupalliseen käyttöön.
