










Hvorfor navigering er krevende for profesjonelle støvsugerroboter
I profesjonelle bygninger hersker det forhold som utgjør en utfordring for navigasjonssystemer. Arealene er store, planløsningene varierer, og de endres ofte: Dører står åpne, vogner flyttes, folk beveger seg gjennom områdene, eller flere roboter kjører samtidig. En pålitelig navigasjon for støvsugerroboter må håndtere dette sikkert, uten utfall og uten å miste orienteringen.
Et annet poeng er personvern. Mange forbrukerapparater bruker kameraer. I kommersiell bruk kan dette være problematisk, da personer eller sensitivt innhold kan bli registrert. En profesjonell løsning baserer seg derfor på laserbasert SLAM-navigasjon uten kamerabilder.
Hva SLAM betyr – teknisk klassifisering
SLAM står for «Simultaneous Localization and Mapping». Begrepet SLAM Robotics beskriver algoritmer som lar en robot kartlegge og lokalisere seg samtidig. To oppgaver foregår kontinuerlig samtidig:
- Lokalisering: Hvor befinner roboten seg i dette øyeblikket?
- Kartlegging: Hvordan ser omgivelsene ut strukturelt?
SLAM er ikke en enkelt sensor, men en matematisk tilnærming der kart og posisjon oppstår parallelt. Profesjonelle systemer bruker lasersensorer i stedet for kameraer, fordi dette fungerer uavhengig av lys, er mindre utsatt for forstyrrelser og holder seg innenfor personvernlovgivningen.
Hvordan SLAM-navigasjon fungerer i en støvsugerrobot
En støvsugerrobot med SLAM-navigasjon behandler sensordata kontinuerlig. Den tekniske prosessen er klart strukturert:
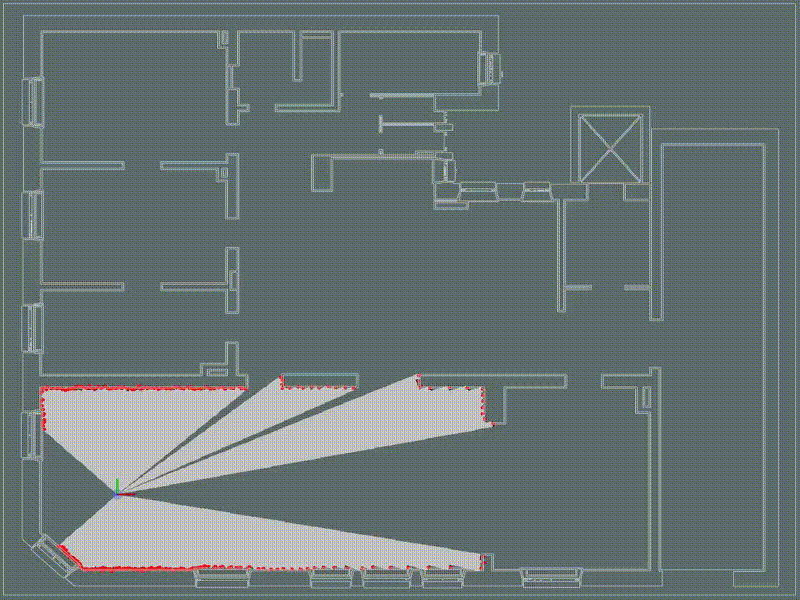
- Laserskanneren registrerer omgivelsene og genererer flere tusen målepunkter per sekund.
- Disse punktene blir samlet til former, kanter og åpninger.
- Nye data blir sammenlignet med det eksisterende kartet.
- Posisjonen beregnes i sanntid ved hjelp av probabilistiske modeller.
- Hindringer eller endringer blir umiddelbart tatt hensyn til, og ruten tilpasser seg automatisk.
Tekniske fordeler med laserskannere sammenlignet med kameranavigasjon
Laser-SLAM løser typiske problemer som oppstår i kommersiell drift:
- Fungerer uavhengig av lys og skygge
- Svært presis posisjonering over store avstander
- Ingen personvernrisikoer ved bildeopptak
- Høy reproduserbarhet av ruten
- Presisjon i trange områder og lange korridorer
- Mindre utsatt for feil takket være enkel, robust sensorikk
Sammenligning av Laser-SLAM og kameranavigering
Hvordan Nexaro NR 1700 implementerer SLAM
Nexaro NR 1700 bruker laserbasert SLAM-navigering, helt uten kamera. Dette oppfyller kravene i rengjøringsbransjen fullt ut: høy presisjon, klare kart og pålitelig posisjonsbestemmelse.
Fordeler i praksis:
- Nøyaktig lokalisering også i komplekse områder
- Dokumenterbar rengjøringsytelse
- Stabil drift i flere skift
- Ingen Wi-Fi nødvendig
- Europeiske servere og TÜV-sertifisert sikkerhet
Med Nexaro HUB kan du administrere kart, styre flåter og definere driftstider. For bygningsservicebedrifter skapes dermed et system som fungerer planbart og effektivt.
Typiske utfordringer – og hvordan SLAM løser dem
SLAM må reagere fleksibelt i virkelige omgivelser:
- Bevegelige hindringer → oppdateringer i sanntid
- Symmetriske rom → landemerker, gjenkjennelse av elementer
- Flyttet møbler → lokale kartjusteringer
- Store åpne områder → bevegelsesmodeller, filtre
- Smuss på sensorer → adaptiv feilretting
Det er nettopp her forskjellen mellom enkel orientering og ekte SLAM Robotics kommer til syne. SLAM er et teknisk grunnlag som i profesjonell bruk avgjør pålitelighet, kvalitet og planleggbarhet. Laserbaserte metoder overbeviser med presisjon, stabilitet og personvern. Nexaro NR 1700 implementerer denne teknologien konsekvent og tilbyr en navigasjon som er utviklet for kommersiell bruk.
